Şase ani de studii clinice
 În 2008, departamentul american care se ocupă
cu problemele veteranilor a semnat un acord cu DARPA privind participarea la
studii clinice pentru a verifica funcţionalitatea protezei Deka şi gradul de
satisfacţie în rândul utilizatorilor şi clinicienilor. Studiile au fost
realizate pe grupuri mici şi au implicat trei generaţii de proteze robotice.
Gradul de satisfacţie privind utilizarea a fost evaluat pe baza chestionarelor
cu răspuns fix şi deschis, pe baza interviurilor filmate şi a scalelor de funcţionalitate
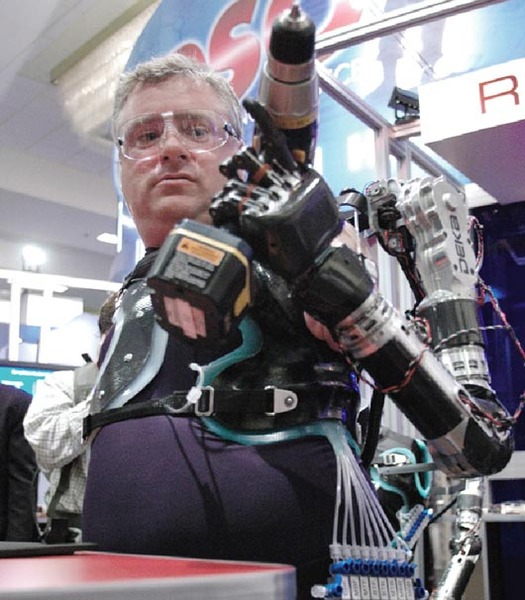
şi satisfacţie. Studiul finalizat în aprilie 2014 a evaluat experienţa purtării
braţului robotic la 37 de veterani. 24 dintre ei au primit braţul de generaţia
a doua, 13 – de generaţia a treia, iar cinci au testat ambele tipuri de
proteze. Proteza de generaţia a treia a primit scoruri mai bune la capitolele
satisfacţia utilizatorilor, funcţionalitate şi aspectul estetic. A fost pentru
prima oară când a inclus şi afişaj electronic la nivelul articulaţiei mâinii.
Elemente precum greutatea, cablurile exterioare, finisajele mâinii (inclusiv
unghiile) vor beneficia de optimizări ulterioare.
În 2008, departamentul american care se ocupă
cu problemele veteranilor a semnat un acord cu DARPA privind participarea la
studii clinice pentru a verifica funcţionalitatea protezei Deka şi gradul de
satisfacţie în rândul utilizatorilor şi clinicienilor. Studiile au fost
realizate pe grupuri mici şi au implicat trei generaţii de proteze robotice.
Gradul de satisfacţie privind utilizarea a fost evaluat pe baza chestionarelor
cu răspuns fix şi deschis, pe baza interviurilor filmate şi a scalelor de funcţionalitate
şi satisfacţie. Studiul finalizat în aprilie 2014 a evaluat experienţa purtării
braţului robotic la 37 de veterani. 24 dintre ei au primit braţul de generaţia
a doua, 13 – de generaţia a treia, iar cinci au testat ambele tipuri de
proteze. Proteza de generaţia a treia a primit scoruri mai bune la capitolele
satisfacţia utilizatorilor, funcţionalitate şi aspectul estetic. A fost pentru
prima oară când a inclus şi afişaj electronic la nivelul articulaţiei mâinii.
Elemente precum greutatea, cablurile exterioare, finisajele mâinii (inclusiv
unghiile) vor beneficia de optimizări ulterioare.
Prinse din zbor
 orientată superior.
Pentru a obţine viteza şi adaptabilitatea căutate, cercetătorii s-au inspirat
din felul în care învaţă oamenii: prin imitaţie şi prin repetiţie. Ei au
aruncat până acum în robot cu o minge, o rachetă de tenis, o sticlă pe jumătate
plină şi una goală şi cu un ciocan, scopul fiind de a-l pune în situaţii
diferite, prin formele variate şi prin schimbarea centrului de greutate în
„zbor“ (sticla pe jumătate plină). În prima fază de învăţare, obiectele sunt aruncate
spre robot de câteva ori, în timp ce camere de filmat plasate în jurul lui le
înregistrează mişcarea şi traseul, din unghiuri diferite. Robotul creează apoi,
pe baza înregistrărilor, modele de traiectorii, viteze şi mişcări rotaţionale,
pe care oamenii le transformă în ecuaţii, iar acestea îi permit maşinii să reacţioneze
din ce în ce mai bine la evenimentele ulterioare.
orientată superior.
Pentru a obţine viteza şi adaptabilitatea căutate, cercetătorii s-au inspirat
din felul în care învaţă oamenii: prin imitaţie şi prin repetiţie. Ei au
aruncat până acum în robot cu o minge, o rachetă de tenis, o sticlă pe jumătate
plină şi una goală şi cu un ciocan, scopul fiind de a-l pune în situaţii
diferite, prin formele variate şi prin schimbarea centrului de greutate în
„zbor“ (sticla pe jumătate plină). În prima fază de învăţare, obiectele sunt aruncate
spre robot de câteva ori, în timp ce camere de filmat plasate în jurul lui le
înregistrează mişcarea şi traseul, din unghiuri diferite. Robotul creează apoi,
pe baza înregistrărilor, modele de traiectorii, viteze şi mişcări rotaţionale,
pe care oamenii le transformă în ecuaţii, iar acestea îi permit maşinii să reacţioneze
din ce în ce mai bine la evenimentele ulterioare. Dacă vrei să fii la curent cu tot ce se întâmplă în lumea medicală, abonează-te la „Viața Medicală”, publicația profesională, socială și culturală a profesioniștilor în Sănătate din România!
Titularii abonamentelor pe 12 luni sunt creditați astfel de:

Dacă vrei să fii la curent cu tot ce se întâmplă în lumea medicală, abonează-te la „Viața Medicală”, publicația profesională, socială și culturală a profesioniștilor în Sănătate din România!
Află mai multe informații despre oferta de abonare.
Cookie-urile ne ajută să vă îmbunătățim experiența pe site-ul nostru. Prin continuarea navigării pe site-ul www.viata-medicala.ro, veți accepta implicit folosirea de cookie-uri pe parcursul vizitei dumneavoastră.
Da, sunt de acord Aflați mai multe